Human Control of a Bicycle

|
Jason K. Moore May 10, 2012 |
|
|
Jason K. Moore May 10, 2012 |


|

|

|
|

|
|

|

|


|
|
|
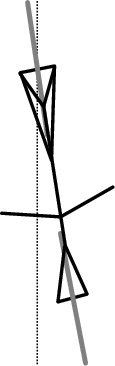
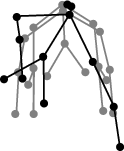
Steer-Roll-Yaw
|
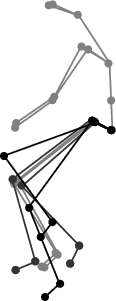
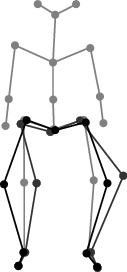
Pedaling
|
|
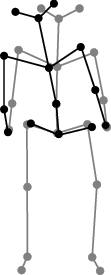
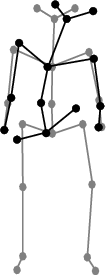
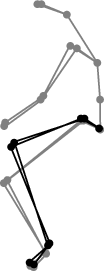
Lateral Knee, Knee Bounce
|

|
|
|

|

|
|
|
|
|

|

|

|
|

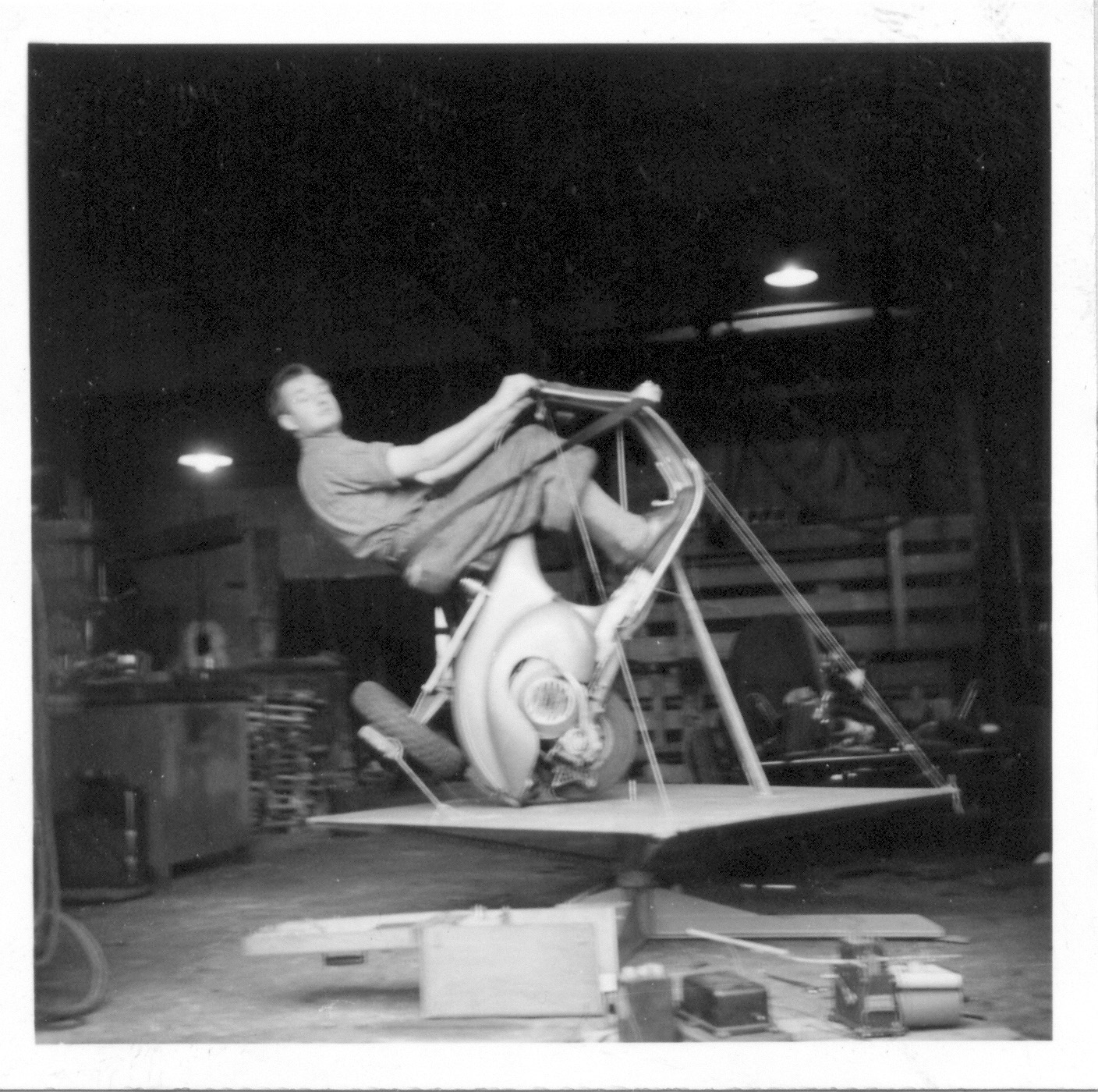
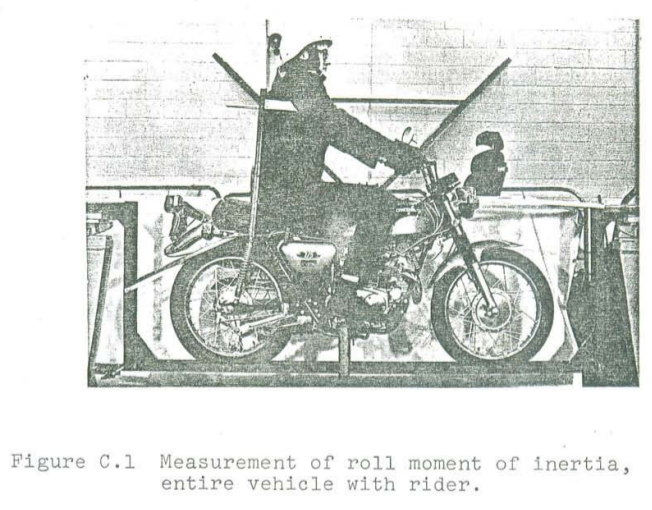
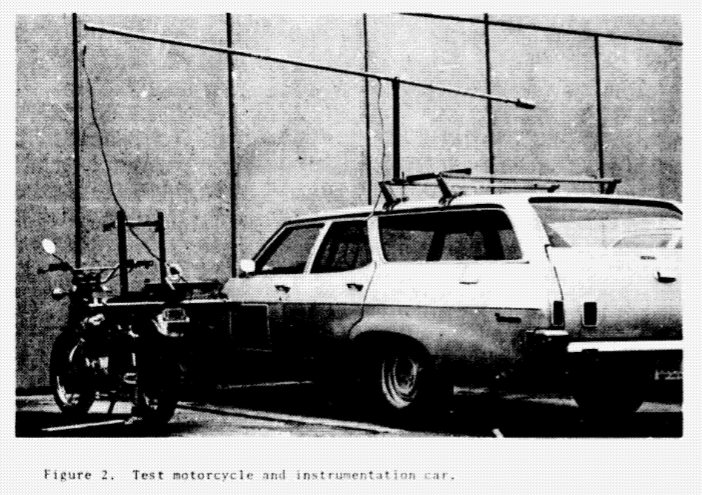
Eaton 1973





1 / 80
#